录:
Part 1 Part 2 Part 3 Part 4文档内容:
[Part 1]
在之前的 FSAA 簡介中,已經有稍微提到三角面的失真(aliasing)問題。不過,在該文章中,主要提到的方法,是在於消除三角面邊緣的 aliasing(通常是鋸齒現象)上面,而沒有提到貼圖方面的問題。而在這篇文章中,將會簡單介紹貼圖的失真問題,和目前 3D 加速晶片所使用的方法。
貼圖的失真問題,和一般繪製三角面的失真問題,有什麼不同的地方呢?最主要的差別,在於繪製貼圖是一個重新取樣(resampling)的過程。因為,貼圖本身也是一個數位影像。所以,貼圖已經是由一個訊號取樣後的結果。現在要把貼圖貼到三角面上,繪製三角面所需要的取樣點,並不一定會剛好是貼圖所使用的取樣點。所以,在這裡會出現二次取樣的情形。下圖是一個例子:
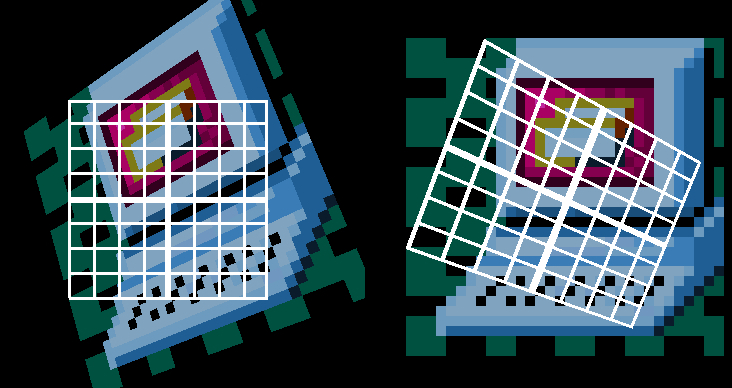
上圖中,左邊的白色格子是和螢幕上的像點對齊的,所以可以把它們看成是放大後的像點。右邊的格子,是相對於左邊這些放大後的像點。所以,可以看出來,當貼圖被貼在 3D 的三角面上時,它的取樣點會有很大的變化。而且,因為透視投影的原因,取樣的間距也不一定會是固定的。這會讓問題變得更複雜。
註:此圖是由 NVIDIA 所提供的 Show Footprint 程式產生的。
如果只看 1D 的訊號,那麼,重新取樣的過程,就是如下圖所示:
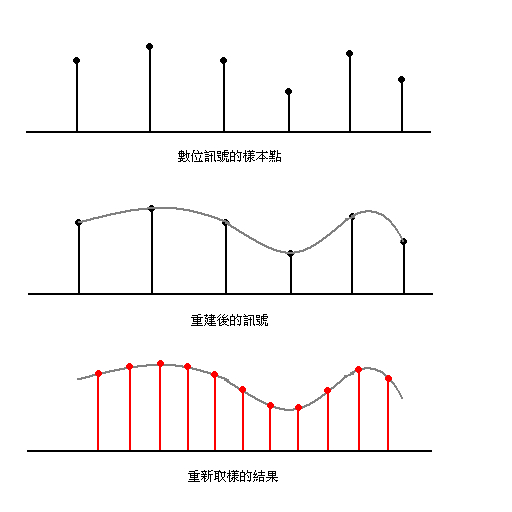
貼圖在被重新取樣的過程中,主要會面臨的問題有兩種:第一種就是放大的取樣,即取樣點的間距,比原先貼圖的取樣點間距要來得小;第二種是縮小的取樣,即取樣點的間距較大。上圖就是一個放大取樣的例子。
[Part 2]
重新取樣的第一個動作,就是要重建原來的訊號。如果重建訊號的動作不正確,就會在重新取樣的時候,造成失真的問題。按照訊號處理的理論,我們知道取樣後的訊號,只要其取樣頻率大於訊號頻率的兩倍(即 Nyquist frequency),就可以重建出原來的訊號。這在許多領域都常被使用,包括聲音處理的領域。在數位圖形的情形下又是如何呢?下面是一個例子:
 |
 |
| 原始訊號 |
重建訊號(使用 60x60 sinc filter) |
可以看到重建出來的訊號有很嚴重的 ringing effect。這是二維訊號難以避免的結果。不過,用這種方法重建出來的訊號,倒是沒有什麼嚴重的 aliasing 問題。然而,利用這種方法重建訊號,是不太可能即時進行的,因為計算量實在是太大了。以上圖為例,上圖使用 60x60 的 sinc filter,所以對每個重新取樣的點,都需要做 60x60 個取樣點的計算。這樣的計算量是非常大的。
除了重建訊號的問題之外,如果重新取樣是縮小的取樣,也就是取樣點的間距變大的話,還需要一個額外的切除高頻成份的動作。這部分比較複雜,所以這裡先以放大的重新取樣為主。
為了要能夠快速重建出訊號,一定要使用簡單的運算。最簡單的運算,當然就是在重新取樣的時候,直接取距離最近的取樣點。因此,這個方法稱為 nearest sampling。因為只取一個取樣點,所以有時也稱為 point sampling。它的結果當然不會太好,而且還會產生新的失真問題。
其實 point sampling 也可以看成利用零次多項式(即常數多項式)去逼近的方法。所以,一個很自然的想法,就是用一次多項式去逼近,也就是線性內插(linear interpolation)。下圖是線性內插的示意圖:
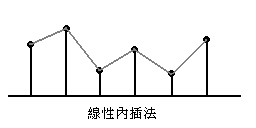
如果是在二維的訊號(像是 2D 貼圖)上,那就要同時對兩個方向都做線性內插,所以稱為雙線性內插(bilinear interpolation)。
使用雙線性內插的時候,每個取樣點需要取 2x2 個點來計算,所以計算量並不大。不過,線性內插的問題在於,它所產生的結果並非平滑的,所以在某些情形下,表現並不好。例如,下圖的例子中,字母 D 的右下角部分,以線性內插產生的結果,就還是有一些鋸齒狀的現象。
如果再提高逼近的次數,就是以三次多項式來逼近了,稱為 cubic interpolation。在二維的情形下,稱為 bicubic interpolation。三次內插有很多不同的型式,不過,對每個取樣點,它都需要 4x4 的計算。就目前的 3D 硬體來說,計算量已經是相當大,所以極少有 3D 硬體支援這種內插方式。不過,三次內插會產生平滑的訊號,所以一般來說,效果比線性內插要好一些。
下面是 point sampling、bilinear interpolation 和 bicubic interpolation 的例子。
 |
 |
 |
| Point sampling |
Bilinear interpolation |
Bicubic interpolation |
一般來說,因為 bilinear interpolation 的效果已經相當不錯,再加上計算量又少,所以一般 3D 顯示晶片都是使用 bilinear interpolation 來處理貼圖的重新取樣問題,特別是在放大的部分。
[Part 3]
如果重新取樣時,取樣點的間距比原來要大,即縮小圖形的時候,就會出現新的問題。最明顯的問題,在於取樣點間距放大時,相對的,取樣頻率也就減少了。這時,訊號中就可能會包含一些過高的頻率成份。所以,這時候會需要一個 low pass filter。下面是一個極端的例子:
 |
 |
 |
 |
| 原始圖片 |
Point sampling |
3×3 Gaussian filter |
Adaptive filter |
在上圖中,原始圖形具有相當多的高頻率成份,但是並沒有超出取樣頻率的一半,所以並沒有失真的現象。但是,如果直接進行重新取樣,縮小為原來的一半時,就會出現失真的現象。可以看出,在左上角以外的三個角落都出現了原先沒有的圓形。如果使用 3×3 的 Gaussian filter 再進行重新取樣,情形就會好一些,圓形變得較為不明顯。如果使用 adaptive box filter,失真的情形就幾乎看不到了。不過,一般情形下,它會有過度模糊的現象。
事實上,對一般的情形來說,簡單的 box filter 的效果就已經很好了。事實上,要找到一個「萬用」的 filter 恐怕是不可能的。如果一個 filter 能消除失真的情形,那它通常會過於模糊。反過來說,如果一個 filter 能產生較為清晰的結果,那它通常就沒辦法有效地消除失真。所以,要使用什麼 filter 往往和圖形本身有關。
不過,如果要即時運算的話,就不太可能利用這些 filter 了。因為,如果縮小的程度愈大,就會需要愈大的 filter 才行。例如,縮小 2 倍通常 2×2 的 box filter 就可以有良好的效果。但是,如果是縮小 4 倍,就會需要 4×4 的 box filter。對於即時運算的情形,這是很麻煩的問題。
為了解決這個問題,Lance William 在 1983 年的 ACM SIGGRAPH 提出了一篇重要的論文 "Pyramidal Parametrics"。這篇論文提出了一個解決方法:如果事先把貼圖用各種大小的 filter 處理,建立許多不同大小的貼圖。將來在縮小的時候,只要選擇適當的大小,就不需要使用超過 2x2 的 filter。這個方法就是 MIP map。MIP 為拉丁文 multum in parvo(即 many things in a small place)的縮寫。
舉個例子來說:如果貼圖的大小是 256×256,可以事先計算出 128×128、64×64、32×32、…、4×4、2×2 和 1×1 的貼圖。假設現在對貼圖做重新取樣,需要縮小 5 倍,這時只要取用 64×64 的版本就可以很快得到重新取樣的結果,而不需要再對原來的貼圖做 5×5 的 filter。當然,這樣會使貼圖所需的空間增加,但是最多只會增加原來的三分之一的空間。考慮到它在速度上的優勢,這點空間其實不算什麼。
不過,即使是使用 MIP map 也無法解決所有的問題。MIP map 必需配合適當的 filter 方式,才能在某些情形下,產生較佳的結果。
[Part 4]
現在我們來看一些 MIP map 的例子。假設現在路邊有三個一模一樣的路標,路標如下圖:
現在把這樣的路標,在近、中、遠三個距離各放一個。如果只使用一般的 bilinear filtering,結果如下圖:
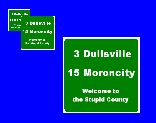
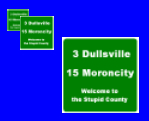
最前面的路標還算清楚,但是後面的兩個路標則變得亂七八糟。像是路標的白色邊緣,在後面的兩個路標就只顯示了一部分。如果使用了 MIP map 的話,結果就會好一些:
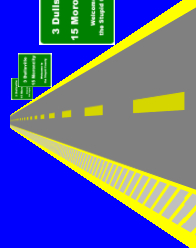
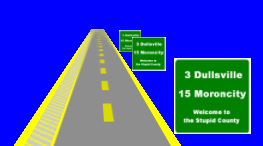
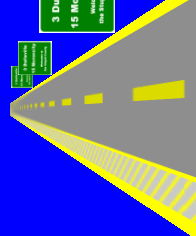
不過,如果對每個 pixel 只選擇某個 MIP map 的解析度,那可能會出現一些討厭的問題。在這裡用一條「路」做例子:

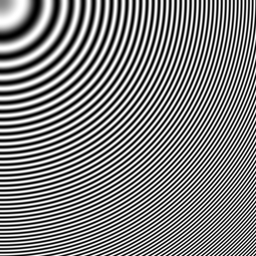
上圖中顯示出一條直路。它並沒有使用 MIP map,所以可以看到左邊的黃色斜線標誌在某個距離外,會出現一些環狀失真的現象。如果加上 MIP map,結果如下圖:

你可能會說:「哇!這是什麼鬼東西!」。很明顯的,它出現過度模糊的現象。不只如此,還可以看到令人討厭的接縫。這是因為在不同的距離,會需要不同解析度的貼圖。但是在轉換解析度的時候,並不能很平滑地轉換,所以才會出現接縫。
這個接縫的問題並不難解決,只要在兩個解析度的貼圖之間,也做線性的內插就可以了。這就是所謂的 trilinear filtering。它的結果如下圖:

可以看到,在使用 trilinear filtering 之後,雖然還是會有過度模糊的現象,但是至少接縫不見了。
為什麼會出現過度模糊的現象呢?這是因為這條路相對於觀察者來說,是相當「扁平」的。所以,它的一個 pixel 在貼圖上的 footprint 會變得很扁,比如說,可能是一個長寬比是 4:1 或更大的長方形。顯示晶片在決定要用哪個解析度的 MIP map 時,會選較低的解析度。所以,就會造成它在某個方向是適當的解析度,但是在另一個方向則會過度模糊。以上圖來說,在垂直方向的解析度是適當的,但是水平方向就不適當了。
一個簡單的方法,可以處理這個問題。我們可以強迫顯示晶片使用較高解析度的貼圖。比如說,如果我們知道 footprint 通常是在 4:1 左右的程度,那就可以強迫顯示晶片使用四倍解析度的貼圖。這稱為 MIP map 的 LOD bias。下面是兩個例子:
 |
 |
| LOD bias = -1.0 |
LOD bias = -1.5 |
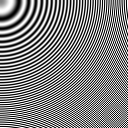
從上面的結果可知,設定 LOD bias 可以改善過度模糊的現象。但是,它同時也造成了失真。可以注意到左邊的黃色斜線標誌又出現一些環狀失真了。
所以 LOD bias 並不能解決所有的問題,而且它也只適用在一些特定的情形。不過,還有一個方法可以處理這種情形。如果我們已經知道某個貼圖的 footprint 總是很扁,而且知道它通常都會「扁」到某個程度(例如,4:1),那其實可以一開始就做一個很扁的貼圖。這對一些像是賽車遊戲的跑道特別有效。下面這個例子就是把路面的貼圖拉長為 4:1 後的結果:
它的效果很好。不過,這個方法只能用在方向是固定的情形,如果視角常常會轉動,那它可能反而會變得更為模糊。當然,對於一般視角變化不大的情形,像是一般的賽車遊戲,它是很不錯的做法。不過,對於像是第一人稱射擊、飛行模擬等視角變化較大的遊戲來說,這個方法就不見得這麼有用了。下圖是一個例子:
它在遠方的模糊情形仍相當不錯,並沒有明顯的過度模糊現象。但是在較近的地方,特別是黃色斜線標誌,就顯得過度模糊了。所以它並不是一個萬用的方法。
理想上的做法,是使用更多的 texel 來做 filtering。例如,如果 footprint 是一個 2:1 的長方形,那就取八個 texels 來做 filtering。如下圖:
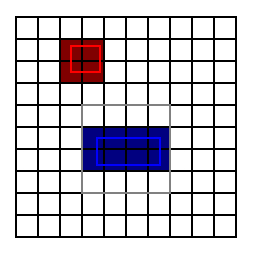
上圖中,亮紅色和亮藍色方框,分別是兩個 pixel 對貼圖的 footprint。亮紅色方框的長寬比並不大,只涵蓋了四個 texels,所以用一般的 bilinear filtering 就夠了。但是亮藍色方框就不一樣了,它的長寬比約略是 2:1,並涵蓋了八個 texels。所以,用一般的 bilinear filtering,會選擇解析度較低的貼圖。因此,它大略會把接近灰色方框的範圍內的 texels 做平均,所以會產生過度模糊的現象。
要避免過度模糊的現象,最簡單的方法,就是直接取它所涵蓋的八個 texels 來做平均。當然,這樣需要的計算量就比一般的 bilinear filtering 要大了。因為通常是在長寬比大於 1 的時候,才會需要這樣的做法,所以又稱為 anisotropic filtering。
當然,一般來說,顯示晶片的硬體並不能無限制去取得 texels。例如,某個硬體可能只支援存取八個 texels(若使用 trilinear 則是 16 個)。而且,因為長寬比愈大,就可能會需要取得愈多的 texels 來進行平均,這樣也可能會讓效能受到很大的影響。所以,一般來說,我們會指定一個最大的長寬比。也就是說,顯示晶片只需要處理長寬比到某個程度,例如 2:1。若長寬比超過這個數字,就只好讓它變得過度模糊了。這個數字通常稱為 maximum level of anisotropy。
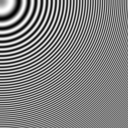
下圖是把最大的長寬比設為 2 的情形:

因為它只處理長寬比到 2:1 的情形,所以在遠方過度模糊的情形,和把 LOD bias 設為 -1 是完全一樣的。不過,和 LOD bias 不同的是,它並沒有在黃色斜線標誌上,產生環狀失真的情形。
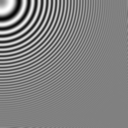
下圖是把最大的長寬比設為 16 的情形:
可以看到幾乎所有的失真,包括過度模糊的現象,都已經消失了。這樣的確是可以產生非常高品質的貼圖效果。不過,它的缺點也是很明顯的:對每個貼圖來說,使用 trilinear filtering 的情形下,最多會需要讀取 128 個 texels。這會需要很多顯示記憶體的頻寬,因此會造成效能降低。而且,也不是所有的顯示晶片都支援到這麼高的 anisotropic filtering。例如,NVIDIA 的 GeForce 256 和 GeForce 2 系列顯示晶片,就只支援到長寬比為 2 的 anisotropic filtering。